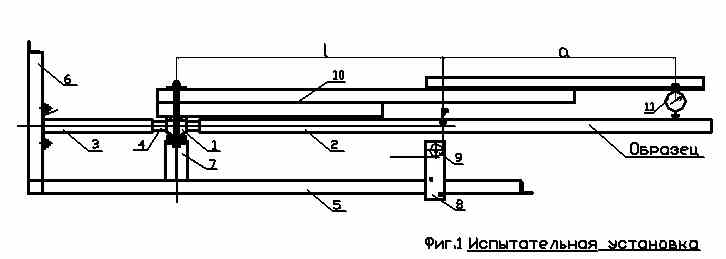
К расчету сжатого стержня
с учетом реальных условий его взаимодействия
со смежными элементами каркаса.
В
расчетной
модели
каркаса
узловому
соединению
стержней
обычно
соответствует
наложение
кинематических
связей,
обеспечивающих
совместность
линейных и угловых
перемещений
торцевым
плоскостям соединяемых
стержней. Известно,
что
анализ
напряженного
состояния
реальной
структурной
конструкции
может быть
выполнен с
достаточной
точностью по
шарнирно-стержневой
модели без
учета
угловых
перемещений
в узлах.
Однако
игнорирование
их
совместности
приводит к
чрезмерному
занижению
несущей
способности
сжатых
стержней,
определяемой
по действующим
нормам.
На первый
взгляд,
жесткость
узловых
сопряжений
«Меро»,
«Кисловодск»
и т.п.,
действительно,
кажется
незначительной,
недостаточно
определенной.
Пренебрежение
ею в СНиП II-23-85 и СП 53-102-2004 можно
объяснить
также
неразвитостью
методики и
техники
расчетов, но
уже в начале
80-х были
получены
экспериментальные
данные,
свидетельствующие
о
необходимости
детальных
исследований
в данном
направлении.
Как часто
бывает,
начало было
положено в связи
с решением
совершенно
иной
прикладной
задачи.
Институт
МГСПИ МЭП,
один из
немногих
пионеров
освоения
структур в
СССР,
поставил
задачу -
создать
средство измерения
усилий в
стержнях. В
основу
методики
измерений
была положена
зависимость
частоты
поперечных
колебаний
стержня от
продольного
усилия, но
уже в первых
экспериментах
проявилось
весьма существенное
влияние
жесткости
сопряжения
стержней в
узлах. В
результате
был создан
прибор, способный
измерить и
усилие, и
степень
защемленности
стержня в
узлах
структуры (А.С.
№ 1236362 1984г.).
После
обсуждения в
ЦНИИСКе результатов
измерений (Протокол
86)
головным
институтом
ЦНИИЛМК была разработана
и выполнена
обширная
программа
теоретических
и
экспериментальных
исследований
по уточнению
расчетов
несущей
способности
сжатого
стержня в
структурном
каркасе (Программа
86).
Получены
существенные
результаты.
Во-первых,
было
обосновано
использование
в типовых
проектах
ЦНИИЛМК значений μ<1
(Протокол
87), что
дало
существенный
экономический
эффект
немедленно.
Во-вторых,
было установлено,
что несущая
способность
сжатого стержня
системы
«Кисловодск»
зависит не только
от жесткости,
но и от
прочности на
изгиб стыка
стержня с
коннектором.
Таким
образом,
аналитическая
работа А.Я.
Дривинга,
исполнителя
темы со
стороны
ЦНИИСК,
позволила
наметить
важнейшее
направление
конструктивно-технологического
развития
структурных
конструкций
на многие
годы вперед.
Некоторые
результаты
такого
развития
отражены в
изобретении
по Патенту
№ 2004732 1992г,
но наиболее
важные
вопросы были
решены
значительно
позже.
Главный из
них
-
возможность
предварительной
затяжки
резьбового
соединения
до уровня, когда
оно может
считаться
«высокопрочным»
по п. 3.7 СНиП II-23-81.
Как и другие
важные
вопросы, он
решен в
полезной
модели по Патенту
№ 61311 2006г.
С этих пор
резко
возрастает
актуальность
учета в
рабочем
проектировании
фактической
изгибной
жесткости
сопряжений.
Кстати, за
минувшие
годы
неизмеримо
выросли и
возможности
реализации
подобных
проектных
задач.
Работа в
намеченном
направлении
возобновилась
в 2006г. В основу
был положен
принцип непосредственного
вычисления параметров
защемления
стержня
подобно тому,
как это
рекомендовано
в Приложении
«О» СП.
Вскоре стало ясно,
что задача не
может быть
корректно
поставлена и
решена в
рамках
традиционной
плоскостной модели
продольного
изгиба
стержня. К
концу 2008г
разработана Программа
2009 исследования
неплоскостного
продольного
изгиба
стержня
структуры и к
середине 2009г выполнены
основные ее
пункты
(Статья).
Важная
часть этой
работы
выполнена
В.А. Еремеевым,
профессором
мехмата ЮФУ.
Все, что
связано с
программированием,
сделано В.Ф.
Соколовой.
Изложение
ведется от
имени этого
коллектива.
До сих пор
нам не
удалось
отыскать
иных решений
задачи о
неплоском
продольном
изгибе
стержня с
упругоподатливыми
закреплениями
по концам.
Правда,
монография / 1 /
содержит
изложение
результатов,
полученных
А.Вардани и
Е.А Бейлиным
для
некоторых
частных случаев
закрепления
концов
сжатого стержня,
приводящих к
пространственной
форме потери
устойчивости.
В
рассмотренных
здесь схемах
закрепления
используются
цилиндрические
шарниры,
одинаково
ориентированные
по концам
стержня.
Возможность
обобщения
полученных
результатов
авторы / 1 /
видят лишь в
анализе
схемы с
цилиндрическими
шарнирами,
по-разному
ориентированными
на концах
стержня.
Авторы / 2 /
предлагают,
вообще,
отказаться
от нормативной
процедуры
расчета на
устойчивость
по п.8.1.3 СП , заменив
ее
деформационным
расчетом на
прочность
конструкции
со
случайными
начальным
несовершенствами.
Публикация / 2 /
вызывает
слишком
много вопросов
и,
по-видимому,
все это
непригодно при
гибкости
стержней
более 60. С
другой стороны,
мы вполне
согласны с
авторами / 2 / в
том, что
«расчет на
устойчивость»
по п.8.1.3 СП
не имеет
отношения к
самому
явлению
потери
устойчивости.
При этом мы
стремимся
выявить и
узаконить те
преимущества,
которые
можно
получить от
уточнения
расчетов по
нормам.
По существу, φ
можно
рассматривать,
как особый
«коэффициент
условий
работы
сжатого
стержня»,
определяемый
по
установленным
в нормах
правилам.
Влияние
элементов
каркаса,
сопряженных
с концами
стержня, выражается
по этим
правилам
коэффициентом
μ. Важно,
что в
отношении
структурных
каркасов
вполне
корректны
все
допущения,
относящиеся
к процедуре
определения μ и φ. В
частности:
-
погрешности
центрирования
осей стержней
в узле и
погиби не
превышают 0.001 длины
-исследуемые
стержни
могут быть
отнесены к
центрально
сжатым;
- согласно
п.5.2.6 СП,
исследуемые
сжатые
стержни
относятся к « ...1-ому
классу НДС (σ ≤ Ry), (упругая
работа
сечения);»
- согласно
п.5.2.5 СП,
структуры -
это системы «…
закрепленные
от перекоса…;
расчет
таких
конструкций
может быть
выполнен путем
расчета
отдельных
элементов с
учетом их
взаимодействия
между собой …»,
т.е., с учетом
совместности
перемещений
в узлах.
По-видимому,
в статье
впервые
использованы
понятия:
-
«функция
защемления» K(ψ);
-
«главная
плоскости
защемления»,
в которой K(ψ) имеет
минимальное
значение, наклонена
к
координатной
плоскости
под углом ψ;
-
«показатель
ортотропности
защемления»
или
«ортотропность
защемления» n=Kmax/Kmin ;
-
«разнонаправленность
защемлений» δ = | ψ1 – ψ2
| - модуль
угла между
плоскостями главных
защемлений
по концам 1 и 2
стержня.
Стержень
кольцевого сечения
или иного с
радиусом
инерции i(ψ) = const имеет
плоскую
форму
продольного
изгиба только
в тех
случаях,
когда δ = 0 или/и,
по меньшей
мере, одно из n равно
единице.
Результаты исследования, изложенные в статье вполне достаточны для проверки несущей способности сжатого стержня в рабочем проектировании структурных конструкций, хотя в статье вопрос о физическом смысле коэффициента расчетной длины, определяемого как
μ = (Nэ/ Nкр)^0.5,
только
обозначен. В
действительности
этот вопрос
можно
считать
решенным, но
он не был в
статье
достаточно
освещен из-за
ограничений
объема
публикации.
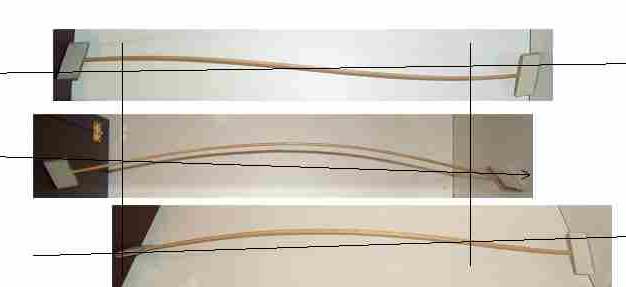
На
стадии
разработки Программы
2009 был
проведен
кухонный (в
полном
смысле) эксперимент,
иллюстрирующий
пространственную
форму потери
устойчивости
стержня кругового
сечения с
двумя
цилиндрическими
шарнирами по
концам с
разнонаправленностью
около 80º.
На
приведенных
фото видна
форма потери
устойчивости
в трех
проекциях,
на которых
с помощью
элементарной
графической обработки
выделены
границы
полуволны синусоиды.
Продольное смещение
проекций
позволяет
убедиться, что
длина
полуволны на
всех
проекциях
приблизительно
одинакова.
Несмотря на
явно качественный
характер
результатов,
эксперимент
дает
основания
предположить,
что для стержней
с сечением
типа
кольца или
круга (i(ψ)
= const) физический
смысл
коэффициента
μ не
меняется при
переходе от
плоской
формы продольного
изгиба к
пространственной.
В последнем
случае он
должен быть
отнесен к проекции
изогнутой
оси стержня
на произвольно
выбранную
плоскость,
проходящую
через
продольную
координатную
ось z.
![]() Это
предположение
подтверждается более
строго с
помощью
решения В.А.
Еремеева,
приведенного
в
статье. Если
взять вторые
производные
от выражений
для прогибов
по x, y и
приравнять
их нулю, то
получим
уравнения:
Это
предположение
подтверждается более
строго с
помощью
решения В.А.
Еремеева,
приведенного
в
статье. Если
взять вторые
производные
от выражений
для прогибов
по x, y и
приравнять
их нулю, то
получим
уравнения:
Ax/Bx + tgνζ = 0 ; Ay/By + tgνζ = 0 ,
где ν = νкр; ζ = z/l ; A, B – постоянные
интегрирования.
Корни
этих
уравнений
определяют положение
точек
перегиба ζi на
проекциях
изогнутой
оси x(ζ) и y(ζ). Ясно,
что они
расположены
на проекциях
в различных
сечениях, но
расстояние
между ними зависит
только от νкр и
на любых
проекциях
одинаково: |ζn - ζ n-1 | = μ.
Ниже охарактеризованы очередные задачи, возникающие в связи с развитием и практическим использованием полученных решений.
1. В статье
отмечено, что
прямое
использование
полученных
результатов
требует
осторожности
при гибкости
стержня
менее 120. Такую
гибкость имеет
20-30% стержней в
типовой
конструкции
«Кисловодск»
и эффект
повышения
несущей
способности
стержня
здесь менее
ощутим, но и
его нельзя
считать
недостойным
внимания. Таким
образом, на
сегодня
наиболее
актуальны
следующие
задачи:
1.А. Наметить
расчетные
характеристики
конструкции,
позволяющие
более или
менее адекватно
и без
больших
осложнений учесть
податливость
сопряжения
элементов
структуры
между собой в
расчете
сжатого
стержня.
Возможно,
наиболее
простое ее
решение
состоит в
том, чтобы
влияние
податливости
сопряжения учитывать
соответствующим
поправочным
коэффициентом
сω к погонной
жесткости
стержня r.
Значение
такого
коэффициента
зависит, как
минимум, от
исходного
значения r, а также от
знака и
модуля
усилия N. При
этом
расчетное
значение
погонной
жесткости rр = сω(r, N) x r должно
быть
использовано вместо r в
любом из
вариантов
определения
Nкр. без
каких-либо
изменений их
записи в статье.
На
первых порах
могут быть
использованы
самые
приблизительные
оценки сω, не
противоречащие
требованию
безопасности,
т.е. заведомо
заниженные.
1.Б. Установить
совокупность
характеристик,
позволяющих
достаточно
адекватно
учесть влияние
податливостей
ω;
по возможности
уточнить
численные
значения
этих
характеристик.
По-видимому,
здесь
основное
содержание
исследований
касается
определения
фактических
значений
податливости
сопряжений ω в
конструкции,
что
предполагает
обязательное
использование
и решающую
роль
экспериментальных
методов исследования.
Возможно, в
качестве
первого шага
решения
данной
задачи,
следует
ввести различные
методики учета ω при
вычислении
«К» и «μ».
Полезным
может
оказаться и
разделение
влияющих j-стержней
на сжатые и
растянутые.
2. Иные
задачи
связаны с
расчетом
пространственных
конструкций, не
относящихся
к
структурным.
В частности:
2.А. Построить
алгоритмы и
соответствующие
подпрограммы
«К» и «μ» для
каркасов,
включающих
центрально-сжатые
стержни с
сечениями типа i(ψ) ≠ const.
Решение
этой задачи
может быть
получено, в принципе,
теми же
приемами, что
и в статье
с некоторыми
осложнениями.
В общем
случае
i(ψ) имеет
форму
эллипса.
Соответственно,
момент инерции
сечения I(ψ) и
погонная
жесткость
стержня r(ψ)
пропорциональны
значению
i²(ψ) = (ni)²/(n² cos²ψ + sin²ψ),
где: i
- минимальное
главное значение
радиуса
инерции;
ni - максимальное главное значение радиуса инерции;
ψ -
угловая
координата,
отсчитываемая
от
минимального
радиус-вектора
i.
Ясно, что в расчетной модели каркаса для каждого стержня должны быть заданы i, n, а также направление свободного радиус-вектора i в системе координат модели, например, его направляющими косинусами. Для вычисления параметров «К» необходимо установить аналитическое соотношение между текущим положением ψк вектора τ и его положением относительно радиус-вектора i каждого влияющего стержня.
Несколько
изменится
сам перечень
характеристик
«К»: в их
состав должны
быть
включены ψ1 и ψ2 вместо
прежнего δ = |ψ1 – ψ2|, причем здесь
за начало
отсчета ψ
удобнее
принять положение
радиус-вектора
i .
Составление уравнения устойчивости стержня не вызывает осложненний. После того, как из него найдено νкр, Nкр и μ = (Nэ/ Nкр)^0.5, расчетное значение гибкости отыскивается, как
λ = μλэ = μ (L / i).
В
целом, по
предварительными
оценкам все
необходимые
изменения и
корректировки
можно реализовать
в пределах
возможностей
Автокад.
2.Б.
Построить
алгоритмы и
соответствующие
подпрограммы
«К» и «μ» для
каркасов с
несмещаемыми
узлами ,
включающих
сжато-изогнутые
стержни с i(ψ) ≠ const.
В
принципе,
разработанные
приемы
определения «μ» можно
применить и в
нормативных
расчетах сжато-изогнутых
стержней, т.к.
и здесь используется
понятие
«приведенная
гибкость». Пока
трудно
оценить
характер и
объем всех доработок
и корректировок,
которые для
этого
потребуются. По-видимому,
значимость
неплоской
формы продольного
изгиба для
таких систем,
сравнительно,
невелика.
Заключение:
1. Учет реальных условий взаимодействия сжатого стержня со смежными элементами каркаса остается актуальной задачей. В общем случае должна использоваться неплоская схема продольного изгиба.
2.При
определении
несущей
способности
сжатого
стержня по п. 8.1.3
СП все
условия его
взаимодействия
со смежными
элементами в
упругой
модели
каркаса
выражаются единственной
количественной
характеристикой
μ. В
плоскостной
схеме
продольного
изгиба
геометрическая
ее
интерпретация
μ = l /L и
статическая
- μ = (Nэ/ Nкр)^0.5 -неразрывно
связаны. Для
относительно
простого
случая
неплоского
продольного
изгиба
стержня с сечением
типа i(ψ) = const эта
связь также
вполне
очевидна.
В более
общем случае,
когда i(ψ) ≠ const,
возможность
чисто
геометрической
интерпретация
пока не ясна.
Здесь
использование
значения μ = (Nэ/ Nкр)^0,5 , по-видимому,
заслуживает
(или требует?)
какого-то
обоснования,
как более
универсального.
3. Актуальнейшей задачей является включение полученных и разрабатываемых решений в используемые ПК. В связи с этим область применения этих решений должна быть по возможности расширена, чтобы повысить экономическую целесообразность связанных с этим работ. Намеченный выше перечень актуальных задач нельзя считать ни исчерпывающим по объему, ни обязательным по очередности.
Литература.
1.Перельмутер
А.В. ,
Сливкер В.И.
Устойчивость
равновесия
конструкций
и родственные
проблемы. Том
1.
Издательство
СКАД СОФТ.
Москва 2007.
2. Бритвин
Е.И.,
Тарнопольский
А.А.
К вопросу
о проверке
устойчивости
стержневых
конструкций
© 2003 Selena BOS Ltd. http://www.selenasys.com